RESEARCH
发布时间:2024-11-04 浏览量:
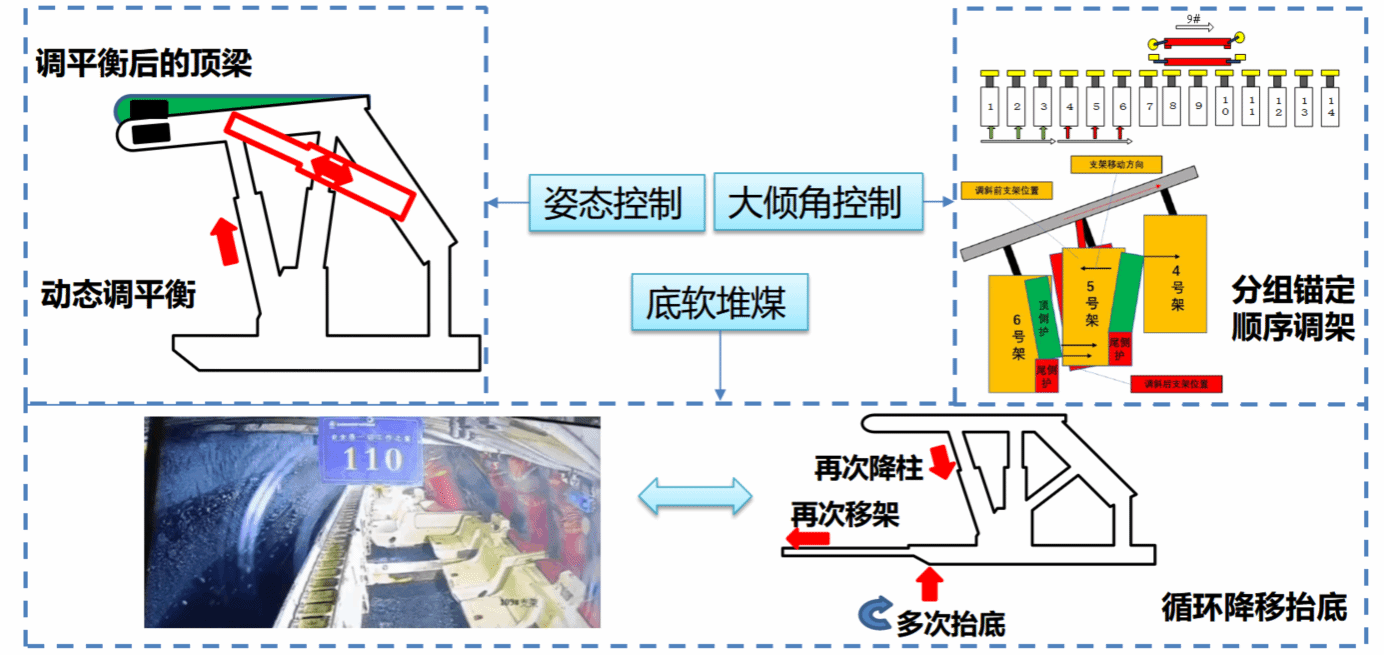
实验室针对基于可视化远程干预的无人化采煤方案中,综采工作面上需要布置控制用现场总线与视频通信用以太网两条通信链路,设备数量多,布线多,系统成本高,工程实施、后期维护困难等难题。研发了基于实时以太网的液压支架控制系统,实现“一网到底”,将井下液压支架控制纳入工业以太网体系。 取得了显著成果:
首创适用于综采工作面的工业以太网与现场工业总线融合的网络型智能控制系统,实现了基于 EtherNet/IP 协议的 100Mbps 高速以太网和500KbpsCAN 总线的多链路冗余通信控制。
研制了跨平台、跨链路、融合多场景应用的控制系统应用软件图形化开发平台,实现了用户需求到实现的快速转化,减少应用软件开发时间 60%。
建立了控制单元多传感器集成机制,开发了复合型的遥控集成控制结构,国内首次研制出多传感器融合的遥控装置,人员定位误差小于 0.75m,响应时间不大于 300ms。
首创了“浅充瞬放、透明监测”的动态电源管理机制,实现电控系统负载平衡,储能型驱动器动态调节控制单元内电流,全工况工作电流小于 100mA。
首次实现控制单元适配矿鸿操作系统,设计矿鸿手机 APP,首次实现移动端对支架控制、监测等功能,实现基于 NFC+WIFI+Bluetooth 的近场感知互联互通。
该系统至今已推广至全国 30 余个综采工作面,并且由于核心技术与产品具备通用性优势,也可用于泵站、三机乃至掘进机控制系统,具备非常广阔的应用场景。
地址:北京市朝阳区青年沟路5号煤炭智能开采与岩层控制全国重点实验室
电话:010-84263039
邮编:100013
电邮:sklicmsc@163.com

GeoEnergy Communications

采矿与岩层控制工程学报

实验室公众号
版权所有:煤炭智能开采与岩层控制全国重点实验室 京ICP备2020046250号-3
