RESEARCH
发布时间:2024-11-04 浏览量:
实验室针对辅运环节减人增效、安全生产面临的技术难题,以辅助运输系统的智能化决策和自动化协同运行为核心,以 “智能辅运机理—智能辅运方法—井下车路协同技术—高级辅助驾驶关键技术及装备—工程示范”为主线,开发了煤矿井下车联网与高级辅助驾驶关键技术与装备,并进行了工程示范。取得了显著成果:
研发了井下车路协同技术及装备,构建了井下C-V2X运行环境,开发了井下边缘计算关键技术,实现了辅助运输车辆的井下-地面的全景交互和应急干预。
开发了井下高精度“类GNSS”车规级定位导航系统,研发了多源数据融合的井下精确定位导航技术,解决了井下车辆动态定位精度低的问题,实现定位精度≤30cm,定位响应时延≤100ms。
研制了井下车载多传感与车联网信息融合的一体化感知系统,开发了井下多源数据融合感知模型,实现了盲区监测与超视距感知功能,为井下障碍物多场景精准识别提供了技术支撑。
自主研发了行业首套车载全系列矿用本安型感知与决策控制装备,实现核心装备全国产化、本安化,填补了井下车载智能感知与决策控制装备的空白。
在井下辅助运输安全预警、井下车辆高级辅助驾驶/自动驾驶技术及安全保障方面取得了多项国际先进的创新性研究成果,解决了煤矿井下车规级定位、导航、多场景精准感知和辅助运输智能化装备空白等关键难题,引领了煤矿辅运智能化的发展方向。建成了安全、 高效、智能辅助运输示范工程,在李家壕、柠条塔等10余个煤矿实现盲区监测、障碍物预警、驾驶员异常行为检测等高级辅助驾驶应用;在曹家滩煤矿与红柳煤矿辅运大巷,实现了共计7.3km的自动驾驶,运行里程已超3000km。形成了井下高级辅助驾驶/自动驾驶解决方案,为煤矿智能化建设提供了重要技术与装备支撑。
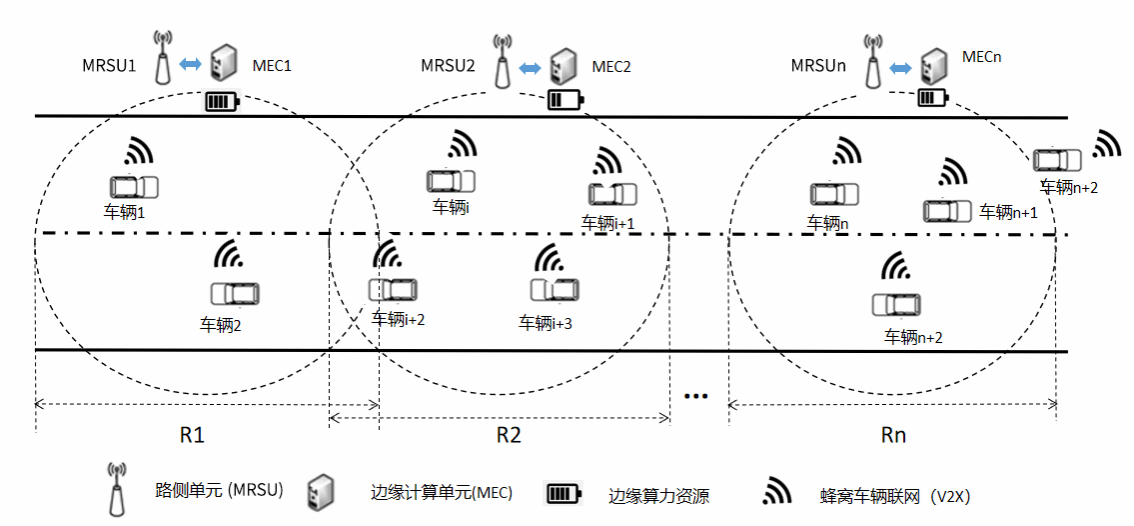
基于C-V2X的车路协同技术
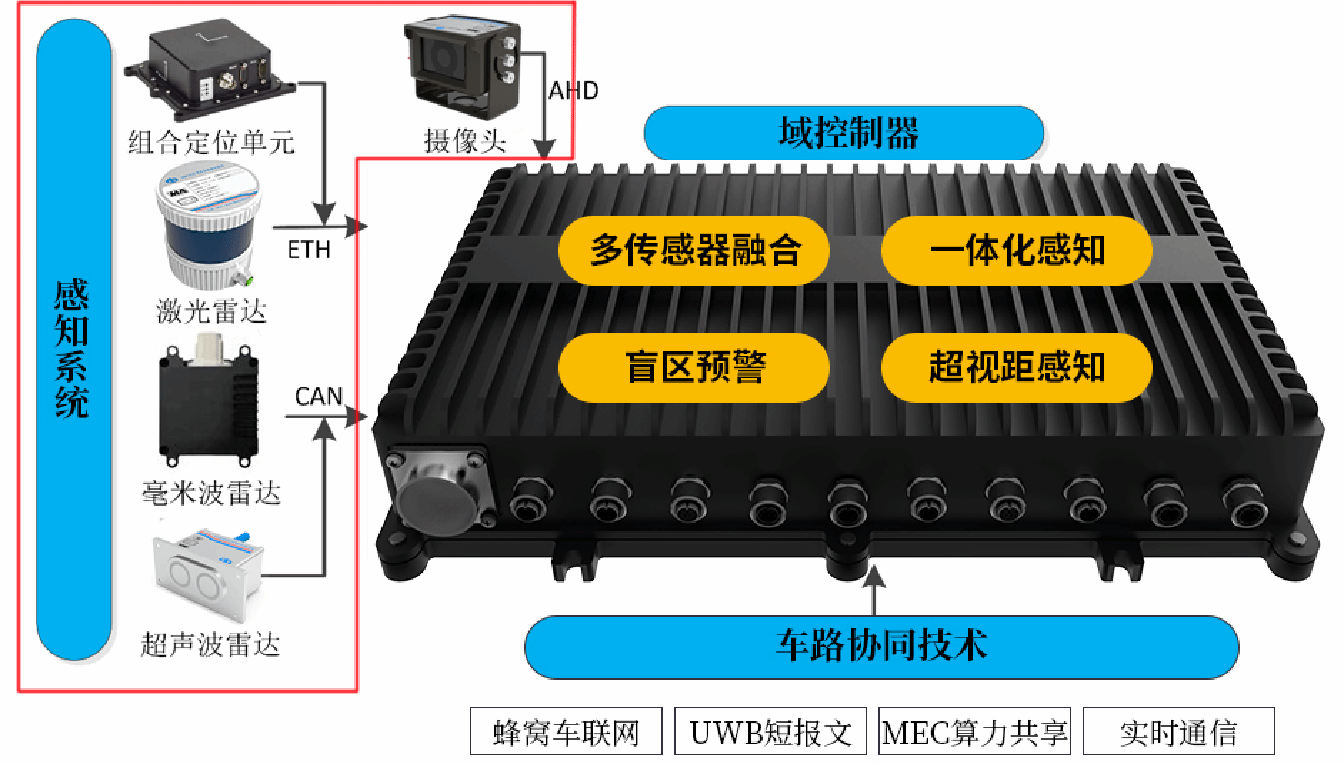
井下车载多传感与车联网信息融合的一体化感知系统
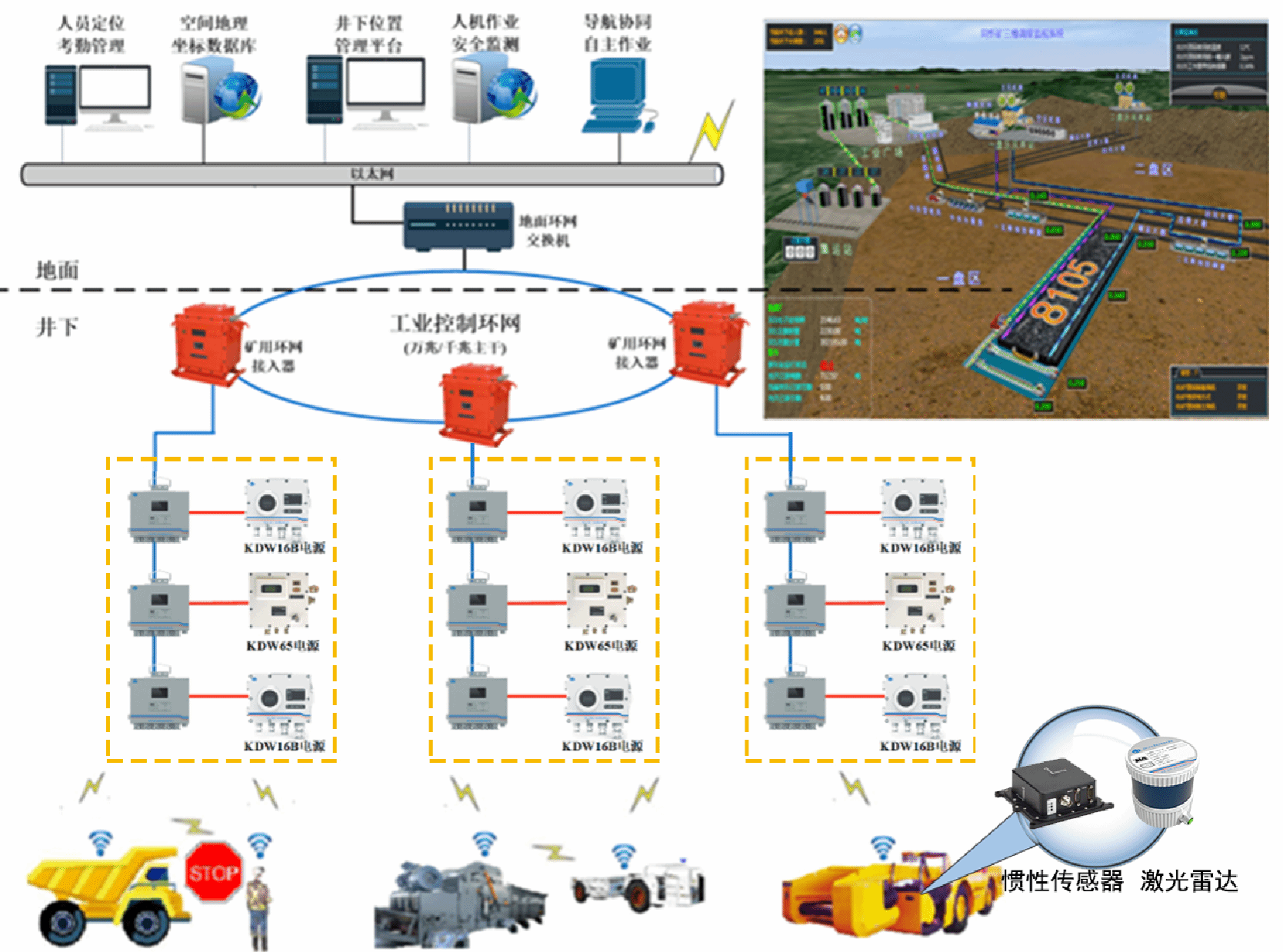
井下高精度“类GNSS”车规级定位导航系统
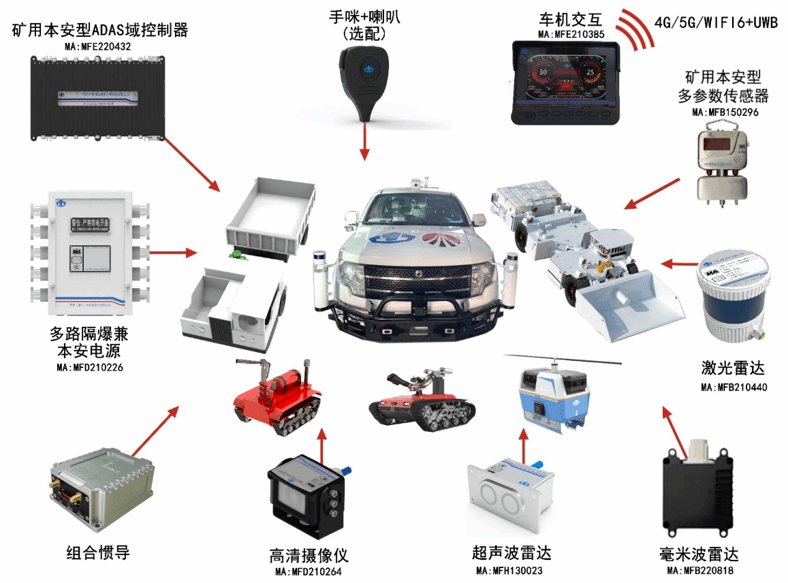
井下车载全系列矿用本安型感知与决策控制装备

下一条:中国专利银奖-2023
地址:北京市朝阳区青年沟路5号煤炭智能开采与岩层控制全国重点实验室
电话:010-84263039
邮编:100013
电邮:sklicmsc@163.com

GeoEnergy Communications

采矿与岩层控制工程学报

实验室公众号
版权所有:煤炭智能开采与岩层控制全国重点实验室 京ICP备2020046250号-3
